注:这篇文章原文出处放在了下面的连接,原文已经写得非常清晰明了,这里有适当的修改和增加内容,写在这里是为了更好地查阅巩固。
朴素贝叶斯(Naive Bayes)是基于贝叶斯定理与特征条件假设的分类方法。
对于给定的训练数据集,首先基于特征条件独立假设学习输入、输出的联合分布;然后基于此模型,对给定的输入x,利用贝叶斯定理求出后验概率最大的输出y。
朴素贝叶斯实现简单,学习与预测的效率都很高,是一种常用的方法。
朴素贝叶斯的学习与分类
贝叶斯定理
先看什么是条件概率
P(A|B)表示事件B已经发生的前提下,事件A发生的概率,叫做事件B发生下事件A的条件概率。其基本求解公式为
贝叶斯定理便是基于条件概率,通过P(A|B)来求P(B|A):
顺便提一下,上式中的分母,可以根据全概率公式分解为:
特征条件独立假设
这一部分开始朴素贝叶斯的理论推导,从中你会深刻地理解什么是特征条件独立假设。
给定训练数据集(X,Y),其中每个样本X都包括nn维特征,即$x=(x_1,x_2,···,x_n)$,类标记集合含有K种类别,即$y=(y_1,y_2,···,y_k)$
如果现在来了一个新样本x我们要怎么判断它的类别?从概率的角度来看,这个问题就是给定x,它属于哪个类别的概率更大。那么问题就转化为求解$P(y_1|x),P(y_2|x),P(y_k|x)$中最大的那个,即求后验概率最大的输出:$arg\underset{y_k}{\max}P\left(y_k|x\right)$ 。那$P(y_k|x)$怎么求解?答案就是贝叶斯定理
根据全概率公式,可以进一步分解上式中的分母:
先不管分母,分子中的$P(y_k)$是先验概率,根据训练集就可以简单地计算出来,而条件概率$P(x|y_k)=P(x_1,x_2,···,x_n|y_k)$它的参数规模是指数数量级别的,假设第$i$维特征$x_i$可取值的个数有$S_i$个,类别取值个数为k个,那么参数个数为$k\prod_{j=1}^n{S_j}$
这显然是不可行的。针对这个问题,朴素贝叶斯算法对条件概率分布做了独立性的假设,通俗地讲就是说假设各个维度的特征 $x_1,x_2,···,x_n$互相独立,由于这是一个较强的假设,朴素贝叶斯算法也因此得名。在这个假设的前提上,条件概率可以转化为:
这样参数规模就降到了$\sum_{i=1}^n{S_ik}$
以上就是针对条件概率所作出的特征条件独立性假设,至此,先验概率$P(y_k)$和条件概率$P(x|y_k)$的求解问题就都解决了,那么我们是不是可以求解我们所需要的后验概率$P(y_k|x)$了?
答案是肯定的。我们继续上面关于$P(y_k|x)$的推导,将公式2代入公式1中得到:
于是朴素贝叶斯分类器可表示为:
因为对于所有的$y_k$,上式中的分母的值都是一样的(为什么?注意到全加符号就容易理解了),所以可以忽略分母部分,朴素贝叶斯分裂期最终表示为:
朴素贝叶斯法的参数估计
极大似然估计
根据上述,可知朴素贝叶斯要学习的东西就是$P(Y=c_k)$和$P(X^{j}=a_{jl}|Y=c_k)$可以应用极大似然估计法估计相应的概率(简单讲,就是用样本来推断模型的参数,或者说是使得似然函数最大的参数)
先验概率$P(Y=c_k)$的极大似然估计是
也就是用样本中$c_k$的出现次数除以样本容量。
设第$j$个特征$x^{(j)}$可能取值的集合为${a_{j1},a_{j2},···,a_{jl}}$,条件概率 $P(X^{j}=a_{jl}|Y=c_k)$的极大似然估计是:
式中,$x_i^j$是第$i$个样本的第$j$个特征。
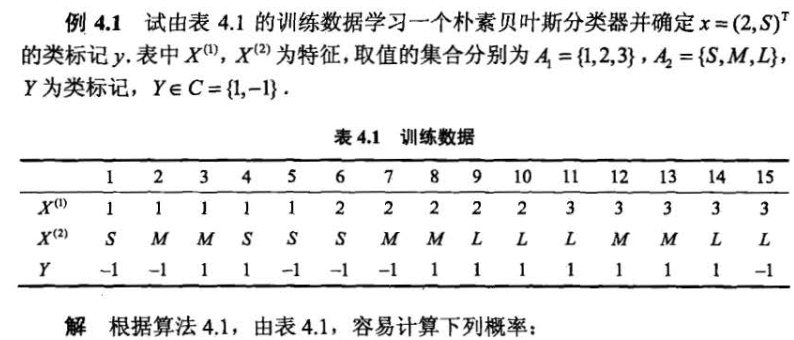
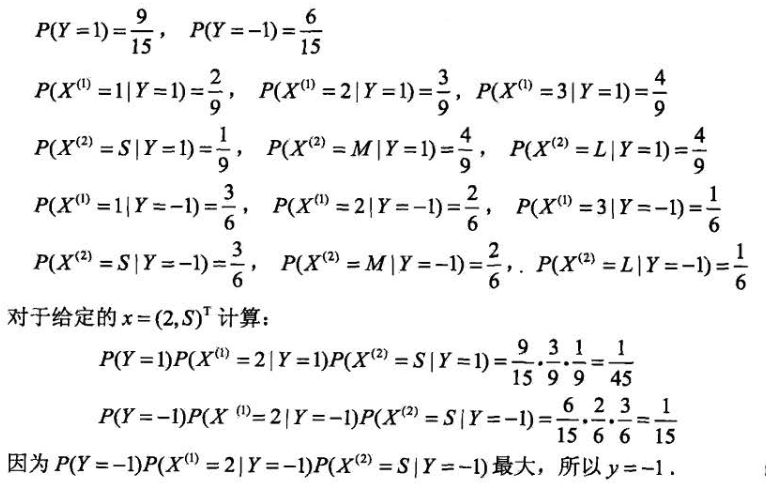
一个例题
例题如下
贝叶斯估计
极大似然估计有一个隐患,假设训练数据中没有出现某种参数与类别的组合怎么办?比如上例中当Y=1对应的$X^{(1)}$的取值只有1和2。这样可能会出现所要估计的概率值为0的情况,但是这不代表真实数据中就没有这样的组合。这时会影响到后验概率的计算结果,使分类产生偏差。解决办法是贝叶斯估计。
条件概率的贝叶斯估计:
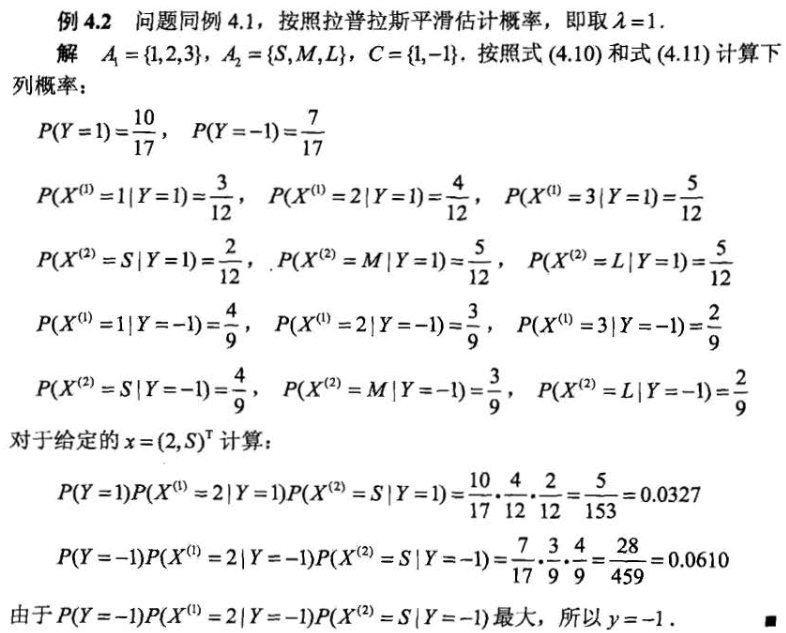
其中$\lambda≥0$,$S_j$表示第$x_j$个特征可能取值的个数。分子和分母分别比极大似然估计多了一点东西,其意义为在随机变量各个取值的频数上赋予一个正数$λ≥0$。当$λ=0$时就是极大似然估计。常取$λ=1$,这时称为拉普拉斯平滑。
先验概率的贝叶斯估计:(K为类别个数)
例题如下:套入公式计算即可
上诉说的是$X_j$为普通离散型的情况。如果$X_j$是稀疏的离散值,即各个特征的出现概率很低,那么可以假设$X_j$服从伯努利分布,即特征$X_j$出现记为1,不出现记为0。即我们只关注$X_j$是否出现,不关注$X_j$出现的次数,这样得到的$P\left(X^{\left(j\right)}=a_{jl}|Y=c_k\right)$是在是在样本类别$c_k$中$a_{jl}$出现的频率,公式如下所示。其中$a_{jl}$取值为0和1。
如果$X_j$是连续值,那么假设$X_j$的先验概率为高斯分布(正态分布),这样假设$P\left(X^{\left(j\right)}=a_{jl}|Y=c_k\right)$的概率分布公式如下所示。其中$\mu_k$和$\sigma_{k}^2$是正态分布的期望和方差,$\mu_k$为样本类别$C_k$中,所有$X_j$的平均值,$\sigma_{k}^2$为样本类别$C_k$中,所有$X_j$的方差,$\mu_k$和$\sigma_{k}^2$可以通过极大似然估计求得。
python代码实现
朴素贝叶斯文档分类
1 | # -*- coding: utf-8 -*- |
使用朴素贝叶斯过滤垃圾邮件
1 | # -*- coding: utf-8 -*- |
朴素贝叶斯优缺点
优点
- 具有稳定的分类效率。
- 对缺失数据不敏感,算法也比较简单。
- 对小规模数据表现良好,能处理多分类任务,适合增量式训练。尤其是数据量超出内存后,我们可以一批批的去增量训练。
缺点
- 对输入数据的表达形式比较敏感,需针对不同类型数据采用不同模型。
- 由于我们是使用数据加先验概率预测后验概率,所以分类决策存在一定的错误率。
- 假设各特征之间相互独立,但实际生活中往往不成立,因此对特征个数比较多或特征之间相关性比较大的数据来说,分类效果可能不是太好。